Endelig fikk vi Bluetooth til å funke igjen. Det var en lettelse! Vi måtte slå av visibility og Bluetooth på EV3 brikken, og så slå den på igjen. Da ble brikken oppdaget av pc’en igjen.
Vi hadde øving fra 12-16 i dag. Kanskje vi skal utvide til søndager også snart. Det er ikke så lenge til vi skal til Lillestrøm.
På dagens øving gjorde vi skikkelig fremskritt på hovedrunden vår. Den løste 4 missions på 31 sekunder (fly, sykebil, jordskjelvhus og vippehus). Det var vi veldig fornøyd med. Vi har fortsatt en del igjen å løse, men vi er i alle fall godt i gang. Den opprinnelige planen vår om å gjøre alt ferdig ila. de seks første ukene gikk i hvert fall i vasken, men vi skal nok hevde oss allikevel. Vi tok opp video av runden, men og tenkte vi skulle vente litt med å legge den ut, men siden det tok oss seks uker å få den ferdig, så tror vi ikke det gjør oss så stor skade om vi legger den ut her.
Vi var ikke helt fulltallige i dag, men vi fikk gjort ganske mye etter hvert allikevel.
Thomas fikk skrevet mye på teorioppgaven sammen med Philip. Og vi tror vi er godt over halvveis nå. Det blir også spennende med teknisk presentasjon. Vi tror Callum blir den utvalgte for å fremføre den. I år skal vi prøve å forberede oss bedre til den. Vi har tatt det helt på sparket tidligere år.
Vi hadde bygget om roboten en del i helgen, så vi måtte justere inn noen programmer, og derfor gikk mye tid bort til det i starten. Når først roboten var bygget om ferdig, med noe ekstra ombygginger i bakparten, var det bare å komme i gang igjen, men da var det bare 20 minutter igjen av de opprinnelige 2 timene som var planlagt.
Noen måtte dra hjem etter hvert, men de fleste var der til kl 2030. Grunnen til at vi bygget om litt var at det nye kulebakhjulet på EV3-roboten var satt på slik at roboten sto litt på skrå. Vi senket bakhjulet litt, slik at den sto rett. Dermed ble gyrosensoren stående rett. Vi vet ikke om det har noe å si, men vi tror i alle fall ikke at det er en ulempe at den står rett.
Vi har noen hemmelige planer med gyroen. Av konkurransemessige årsaker kan vi ikke røpe for mye nå, men vi skal prøve å få tatt en video av det senere, og legge ut på youtube. Vi linker den selvsagt opp her også.
Det vi har gjort til nå synes vi er veldig bra, men vi har nok en del igjen av banen for å få full pott. I år syntes vi banen så veldig grei ut når vi fikk den, men nå som vi har blitt bedre kjent med den, må vi innrømme at det er enkelte utfordringer med den. For eksempel er snora til flyet litt i veien i enkelte tilfeller. Vi har problemer med hindrene med den roboten vi har tenkt til å kjøre med. Vi har tidligere vist at vi klarer å kjøre over alle hindrene ganske lett, men ulempen med det vi viste er at den roboten vi kjørte med der ikke er den vi skal bruke på turneringen. Det er vanskelig å kombinere en robot som går både på banen og over hindrene. Men vi tror i alle fall vi skal greie å komme til sluttpunktet selv om vi ikke har programmert det inn enda.
Dette blir spennende! Vi ser frem til å komme til Lillestrøm.
Forrige gang var vi veldig stolte av at vi fikk til å kjøre med Bluetooth. Men i dag fikk vi det ikke til. Det var veldig surt! Det var jo så bra å bruke Bluetooth, men nå måtte vi tilbake til USB-ledningen. Vi vurderer å kjøpe trådløs sender, men vi får se. Dersom noen har erfaringer fra Bluetooth eller trådløst hadde det vært morsomt å høre fra dere i bloggen her!
Sara hadde lyst til å prøve å programmere litt, så derfor tok vi (pappa og Sara) en ekstraøving der kun hun fikk prøve seg. Vanligvis jobber Sara med pit.
Hun hadde lyst til å løse huset ved å starte fra basen. Thomas og Sara har tidligere jobbet litt med den, og vi lagde en youtube video som vi la ut link til på en tidligere øving, men den ble kun testet fra midt på banen. Den gangen var poenget at den skulle virke uansett hvor du satt den opp, bare den sto ca 90 grader på veggen. For det var en touch-sensor som stoppet den mot veggen. I dag var målet å legge dette inn i en tur som startet helt fra basen.
Siden vi brukte Bluetooth til overføringen av programmene, var det veldig greit å gjøre denne oppgaven, for vi slapp å sette inn USB-ledningen hele tiden. I dag var roboten helt fulladet, så det gikk veldig bra. Å programmere huset gikk ganske greit, og vi fikk den til å virke ganske bra. Det er fortsatt litt forbedringspotensiale. Men det fikser vi senere.
For å teste ut noe nytt, la vi også inn en lyssensor for å se om vi fikk den til å stoppe når den kom til en svart strek. Det er veldig likt touch-sensor, så det tok ikke lang tid før det funket greit. Jippi!!! Det var morsomt å få det til!
Og helt til slutt testet vi ut gyrosensor. Vi kikket i hjelp-funksjonen til EV3-programmet, og fant en fin oppskrift på hvordan man svinger 90 grader med gyrosensoren. Vi satte opp programmet, og den svingte greit. Den endte ikke opp på nøyaktig 90 grader, men det skyldtes kanskje at det er litt slark i systemet enkelte steder.
I dag er det litt rim på jordene nedenfor øvingslokalet vårt, så det kan tyde på at vinteren er på vei.
Vinteren er på vei (morgenbilde 19 okt)
Sara og Therese er på svømmestevne på Langhus i dag, så det er bare gutta som er tilstede på hele øvingen fra 12-16. Nå er det bare tre helger igjen før finaledagen 9. november, så vi håper vi blir ferdig med alle oppdragene snart, slik at vi kan begynne å trene på selve kjøringen. Vi har ikke bestemt 100% hvem som skal kjøre på finaledagen, men vi har en viss peiling. Det blir sannsynligvis ikke Einar og Thomas, siden de skal fremføre forskningsoppgaven.
Siden den gamle pc’en vår tok kvelden forrige helg måtte vi bestille ny. Den fikk vi i går, og Lars har sittet med den i ganske mange timer. Han er ikke så glad i Windows 8 (for å si det mildt), men han skulle la det få en sjanse. Han oppdaterte til Windows 8.1, så vi får se om det fungerer. Hvis ikke må vi få tak i Windows 7, som er siste velfungerende operativsystem for pc.
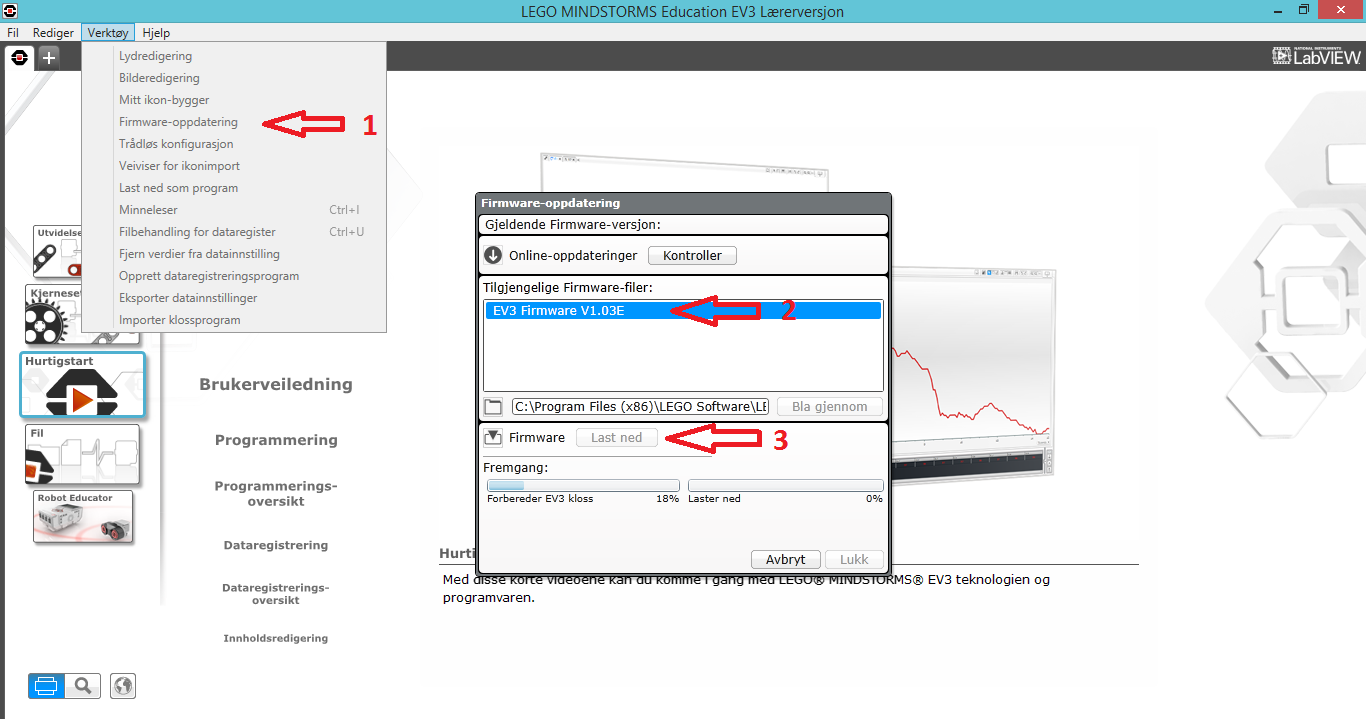
Vi har i allefall fått lagt inn Legos EV3-program til i dag, og så tenkte vi å oppdatere firmware på brikken. Den har klaget på at den må oppdateres hver gang vi kobler den til, så det er på tide å få gjort det. Firmware-oppdateringen gjorde vi ved å gå på Verktøy-linjen, se bildet under. Det var ganske enkelt å gjøre det når vi først prøvde. Siden vi brukte 5 uker på å få det gjort, har vi lagt ut et bilde av det slik at andre også kan få litt hjelp til å gjøre det.
Oppdatere Firmware er ganske enkelt?
Siden vi var så godt i gang med oppdateringer og andre ting, tenkte vi å prøve oss på å få koblet til EV3-brikken ved hjelp av Bluetooth. Etter å ha prøvd flere ganger med den gamle NXT-brikken uten å lykkes, var jo spenningen stor på om det lot seg gjøre med den nye EV3-brikken. Og tro det eller ei! Det lot seg gjøre!!! Vi overfører nå programmene via Bluetooth! Vi fant ut av det ved å lese Hjelp i Mindstorms-programmet.
På øvingen terpet vi videre på hovedturen vår. Vi har planlagt å programmere turer i seks uker, og så øve i to uker på kjøringen, så vi får se hvordan det går med den planen.
Einar og Thomas skrev videre på oppgaven. Gutta har også jobbet litt med en animering som vi skal bruke under fremføringen. Vi får se hvordan den blir. Kanskje vi legger den ut på bloggen etter hvert.
Når det gjelder å kjøre med Bluetooth, var det en drøm. Det var utrolig greit å overføre programmene trådløst. Eneste ulempen var at det sannsynligvis gikk mer strøm. Vi hadde ikke ladet opp EV3-brikken til i dag, og den gikk tom i løpet av øvingen. Så nå skal vi huske på å lade etter hver eneste øving. Men uansett likte vi å bruke Bluetooth.
Callum begynte også på et nytt bygg, en robot som skulle kjøre over alle fire hindringene.
Callum bruker jukse-boka si for å bygge hinder-jeep’en
Det tok litt tid, siden han er sensor-sjef også, og da måtte han hjelpe noen andre med å legge inn noen sensorer. Men ca 1t og 25min etter at øvinga var slutt, var den i boks.
Youtube video her:
Og Thomas leker seg med «Huset som skal løftes»
Sist øving røyk pc’en vår, men i dag har vi bestilt ny! Håper den kommer snart. Lars er HP-fan, så da kan dere jo gjette på hvilket merke han bestilte.
Lørdag er en av veilederne borte (Lars), så da vil Philip og Tommie være trenere. Det går nok bra. Vi har øving som vanlig fra 12-16 på lørdag.
Denne dagen tunet vi inn noen missions, og vi tok tre stk på samme turen. Tror den er i boks nå. Dessverre kan vi ikke avsløre for mange detaljer, men vi kan jo avsløre at det var noen ting som fly, bygninger og sykebil involvert. Men utfra de få opplysningene der er det nok ikke så lett å skjønne hva vi øvde på.
I tillegg så jobbet Einar og Thomas med oppgaven. De skrev tre sider i Powerpoint.
Seriøs øvingEinar og Thomas jobber med teorioppgaven
En annen ting som hendte i dag var at hoved-pc’en vår røyk, dvs grafikk-kortet tok kvelden. Heldigvis har noen av deltakerne på laget med seg egen pc, så det gikk bra. Vi klarte å overføre de viktigste filene til en av de andre pc’ene.
Vi jobbet videre med sykebil/ fly i dag. Det viste seg at denne ikke var 100% i mål enda. Vi har funnet ut at det ikke er så lett å ta sykebilen som vi kanskje trodde tidligere. Opprinnelig hadde vi tenkt å gripe den bakfra og kjøre den til basen ved å dytte. Men da svingte hjulene på sykebilen hele roboten ukontrollert til den ene eller andre siden.
Litt å tenke på der.
Vi fikk en ny deltaker i dag!!! Thomas, som er broren til Einar. De er til og med like gamle, dvs 12 år. Thomas kom fort inn i programmeringen, og fikk prøvd seg litt i dag.
Forrige helg ryddet laget veldig i legoen, og bordet var helt strøkent. I dag rotet vi det til igjen, og enda litt til…
før (lørdag)
Bildet under viser hvordan det så ut etter dagens øving
Etter dagens øving – ikke fullt så ryddig
I tillegg jobbet Christian videre med hiderløypa. Den er jammen ikke lett! Men vi begynner å nærme oss nå – etter å ha testet ut ganske mange varianter. Det beste her er nok AWD (All Wheel Drive), men det er jo ikke så lett å få til det i kombinasjon med alt annet vi har.
Callum og Axel jobbet med presentasjon i dag, dvs til prosjektoppgaven. endelig fikk vi gjort litt på det.
Så har vi ryddet litt i garasjen og fått et pauserom.
I dag er vi fulltallige, og litt kaotisk i det lille øvingsrommet vårt. Men vi har bestemt oss for å flytte tirsdagsøvingen til onsdager kl. 18-20. Vi starter i morgen med onsdagsøvinger, så da tar vi igjen den tapte dagen i høstferien.
Vi jobber med sykebilen for å få den til å funke. Vi er på god vei med den, men ikke helt i mål enda. Hindrene på Syd-veggen har vi ikke klart særlig bra enda.