Åj, åj, dette er spennende! Lurer på hva slags pakke dette er!!!
Byggeinstruksjoner? Tja, vi får se. De kommer 12. september kl. 13 på hjernekraft.org. Vi gleder oss!
Åj, åj, dette er spennende! Lurer på hva slags pakke dette er!!!
Byggeinstruksjoner? Tja, vi får se. De kommer 12. september kl. 13 på hjernekraft.org. Vi gleder oss!
Vil du/dere sponse laget vårt? Da hadde vi blitt veldig glade!
Her er sponsorbrevet vårt.

I dag jobbet vi med repetering og å kjøre ved bruk av variabler på styringen. Det ble kjempebra. Martin og Aksel sto for programmeringen. Vi lagde en video også, som du kan se her.
Siste øving før sommeren er 20. juni.
I dag blir det repetisjon, og kanskje gjøre ferdig lykkehjulet som vi begynte på sist. Det skal terpes på line-follower.
Så skal vi bygge ferdig roboten vår. Prototypen ble ganske ferdig forrige helg, men vi må ha to like, så litt bygging gjenstår. Vi viser ikke frem alle detaljene på roboten enda, men kanskje senere.
Vi jobber med en ny logo til laget vårt. Det kan se ut til at den blir seende slik ut
![]()
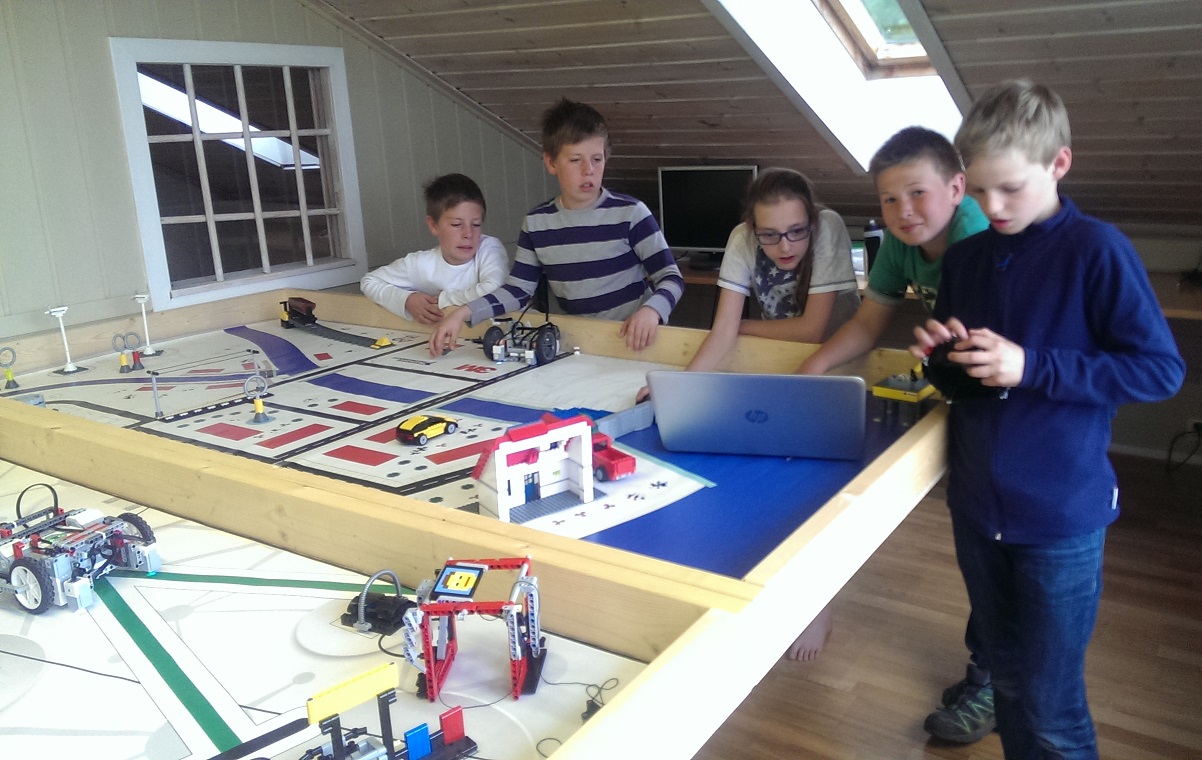
I dag var vi bare fem stykker på øvinga, og to veiledere. Vi gjorde ikke noe særlig av det vi hadde planlagt, men vi begynte på et lykkehjul som vi skal bruke til å ha lotteri en eller annen gang. Planen vår er å spørre om vi kan få stå på Drøbak City og ha lotteri til inntekt for laget vårt. Vi lager selvsagt en randomtall-generator der en servomotor snurrer hjulet tilfeldig.
Så bygde vi litt på en ny robot. Vi testet litt forkjellige hjul, og endte opp med noen brede som vi har brukt for to år siden.
Her er Sara og Aksel med den nye roboten vi begynte på. Det var stort sett Iver som bygde den, men han ble ikke med på bildet.
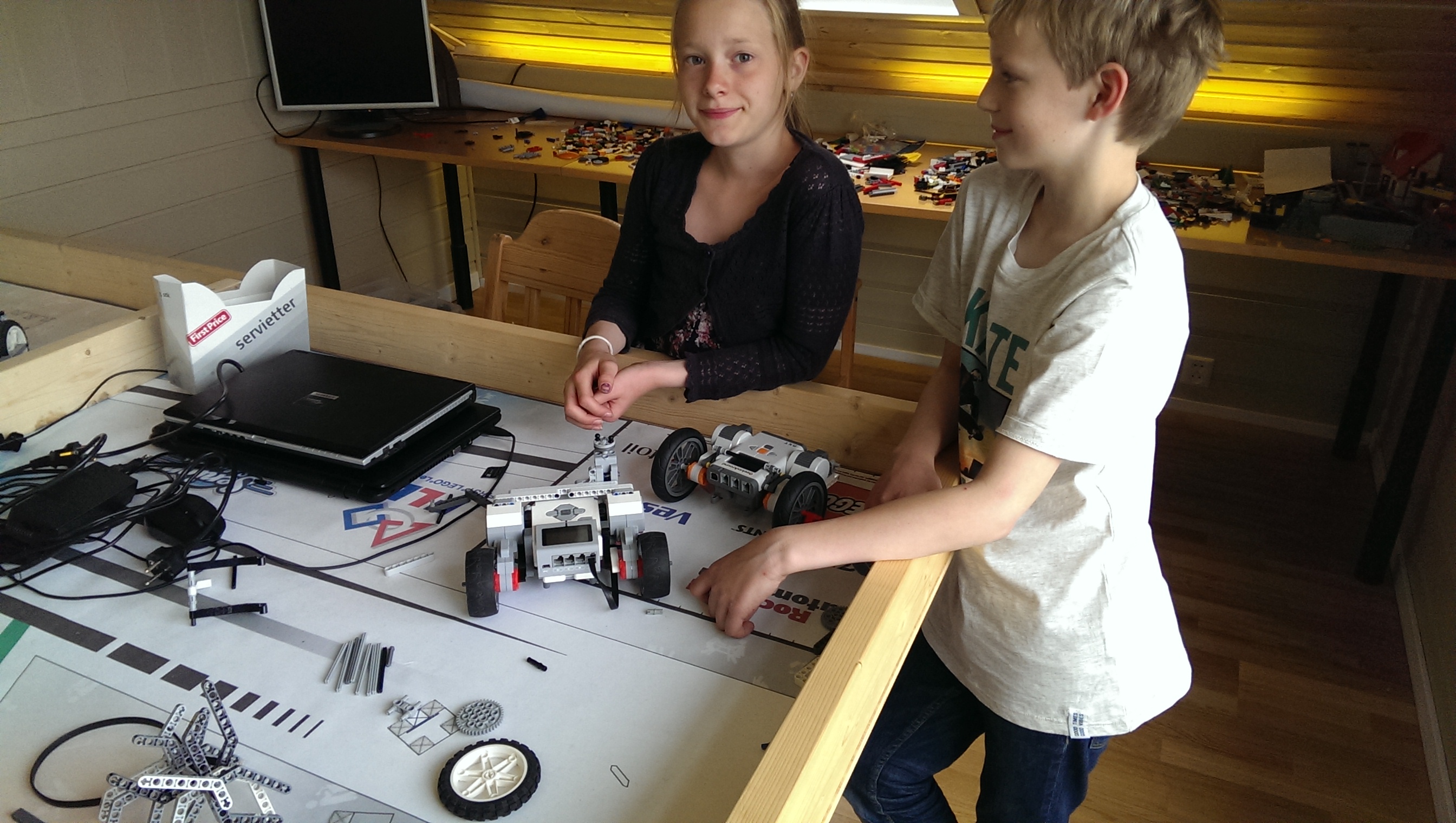
Etter at vi hadde dratt hjem på lørdag, ble det bygd litt mer på roboten. Sara gjorde det hjemme, og slik ble den da.

Legg merke til de høyglans-polerte stålfelgene!
Vår nest siste øving før sommeren er lørdag 13. juni
Da skal vi øve på line follower som styres med reflektert lys. Det er litt mer komplisert enn den som styres av farge. Hvis du studerer den videoen der Synne kjører etter linje (innlegg fra lørdag 6. juni), ser du at roboten gynger frem og tilbake langs linja. Den bør kunne følge linja 100% rett frem, men det er litt mer komplisert. Da må man kunne styre servomotorene med matematiske funksjoner.
Hvis vi får tid skal vi se litt på gyro også. Men vi har dårlig erfaring med gyro fra tidligere år, så vi får se.
Under ser du blokkene i EV3-software’en for variabler og funksjoner.

Denne lørdagen var det øving på linestopper og line-follower. Vi øvde mye på dette, og synes vi fikk det bra til.
Her kjører Synne en test: Først stoppe på grønn linje med fargesensor, deretter kjøre langs grønn linje, og så stoppe på sort linje.
Gutta kjørte også langs linje. Den var sort, og ikke så jevn. Legg merke til at den skjærer ut til siden når den sorte linja blir brutt av en annen sort linje. Beklager at denne videoen ble litt uklar.
Dette programmet kjører mot en strek og bruker to sensorer som styrer hvert sitt hjul. Den er ikke helt perfekt, men det er en bra start.
Legg merke til at det er bare å trykke på startknappen, så starter den på nytt. Det er kult! Ikke noe fikling med å prøve å trykke på brikken.
Neste øving er 6. juni. Da skal vi øve på sensorer.
Stoppe på strek, Line follower (enkel) og kanskje avansert hvis vi får tid. Avansert er at vi bruker lysrefleksjon i stedet for fargegjenkjenning på streken.