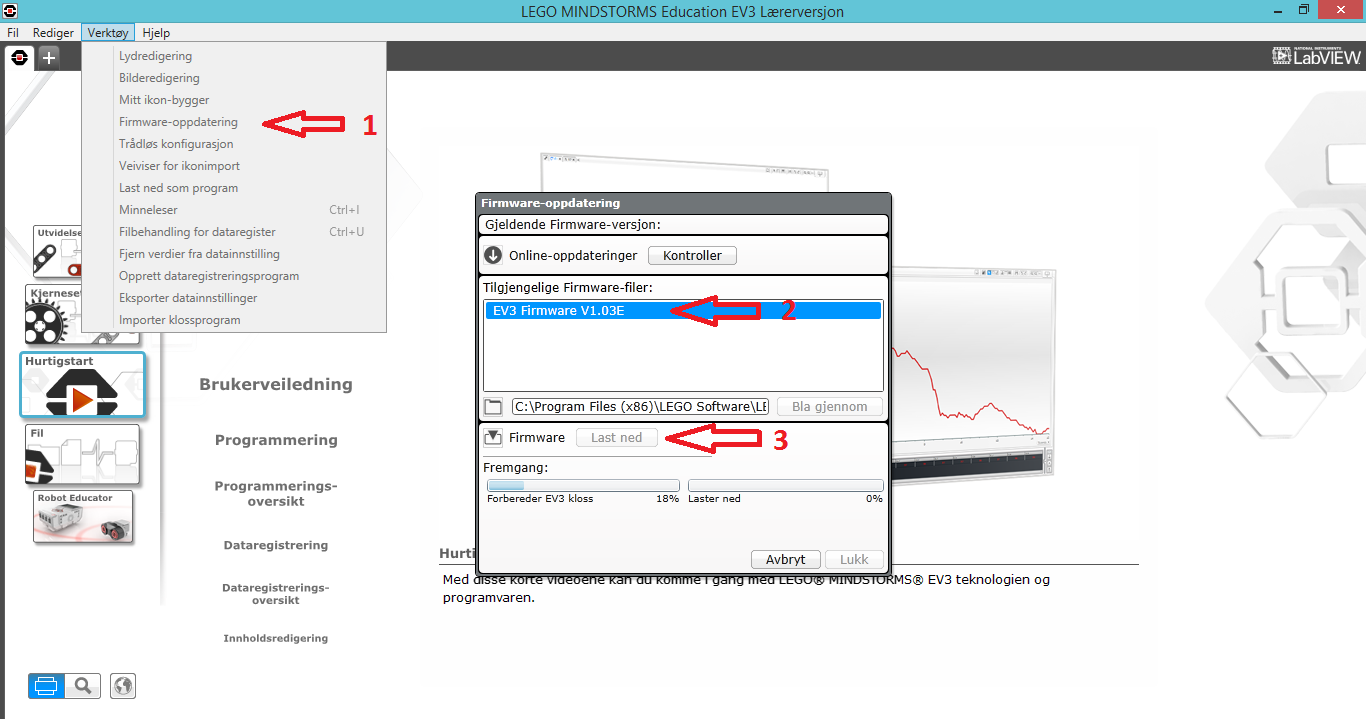
Nå nærmer konkurransedagen seg med stormskritt. Vi var nødt til å legge bort hovedturen vår for å bli ferdig med resten av tingene som skal håndteres på finaledagen. Dagens hovedmål var skiltet, som vi forsåvidt har løst for lenge siden. Vi har bare ikke gjort det med rett robot. Nå la vi inn programmet på EV3, med visse endringer som er veldig bra etter vår mening. Vi liker idiotsikre løsninger. Dessverre viser det seg ofte at ting ikke er idiotsikkert. For eksempel sto bordet vårt skjevt de første 6 ukene. I dag fikk vi rettet det noenlunde opp, og ting endret seg! Skummelt!
På årets turnering håper vi alt er stilt opp slik vi har på vårt bord. For eksempel var banene ikke lagt inn i hjørtet på konkurranse-bordene på Lillestrøm i fjor. Dette håper vi de ordner i år. Så er det plasseringen av fly-stativet. Det kan strengt tatt plasseres litt feil. Vanskelig å ta høyde for det synes vi. For å sjekke det må man bruke sensorer på roboten til å sjekke hvor stativet står, og det kompliserer ting veldig. Vi håper vi treffer!
Vi jobbet også videre med Pit’en i dag. Den begynner å komme seg, men noe gjenstår fortsatt. Vi sydde duk til bordet.

Prosjektoppgaven er også snart i boks. Vi skal øve på fremføringen noen ganger, så sitter vel den også. Nå har vi avtalt å øke antall øvinger. Vi får se hvor mange som møter opp på fredag, men søndag har vi i alle fall avtalt å treffes.
Nå har vi mottatt ekstra T-skjorter også. De skal brukes av de veilederne våre som har mest magemuskler (str. XL)